
In the previous blog, Motors 101: Part I, we discussed how electric motors work, albeit a simplified version. Now that you’ve got a bit of a grip on that topic, it’s much easier to get your mind around what exactly electric motor testing (EMT) does for us. Many times when discussing the types of failures that can be discovered with EMT, I’m met with some level of disbelief. Much of this disbelief stems from a lack of familiarity of both motor design and how the testing protocols themselves work. So, let’s explore both Energized (online/dynamic) and De-energized (offline/static) EMT, and the modes of failure they can help us discover. The foundation for this understanding is your new found motor design knowledge.
In last week’s blog, we discussed the relationship between the stator windings and the rotor, in terms of the electromagnetic fields they each have present during motor operation. These two separate sets of electromagnetic fields depend on one another to operate the motor properly. When their relative proximity to one another is precisely maintained, the motor operates most efficiently. The stator fields “chase” the rotor fields and the motor turns. A number of factors however can cause the spatial relationship between motor components to be imprecise, affecting motor operation and ultimately motor health.
Motor bearing problems are chief among these. The motor bearing holds the shaft in place and is designed to make sure that the air gap between the rotor and stator remains precise while the motor is in operation. If a motor bearing begins to fail due to any number of factors, its ability to support the motor shaft suffers, and the air gap between rotor and stator becomes uneven. This unevenness, called “eccentricity”, causes the electromagnetic fields between the rotor and stator to interfere with one another. This reduces motor efficiency, which in turn causes the motor to require more current to perform the same amount of work as it would in optimal condition. More current equals more heat, and heat is the enemy of an electric motor.
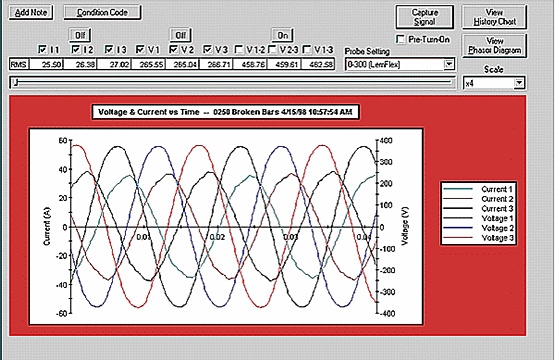
Misalignment of the motor driven components can cause the same effect. Not only that, but driven component misalignment can exacerbate motor bearing problems as well. Misalignment problems are among the issues that Energized EMT can help us discover, due to the impact that this has on the electromagnetic fields of the motor. When the fields are not in precise proximity to one another the voltage, and current sine waves supplying the motor, will show distortion that corresponds to the magnetic interference caused by the eccentricity between the rotor and stator. You didn’t realize it was as simple as that did you? Well it isn’t, really. This is Motors 101 remember? Understanding the waveforms and interpreting the data provided by the Energized EMT test set takes experience.
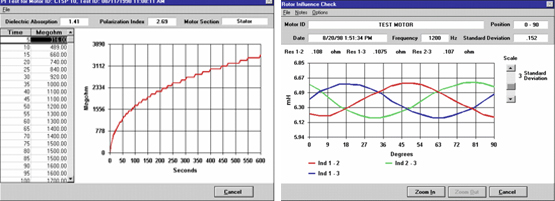
Energized EMT and De-energized EMT provide two different sets of data because they each look at different aspects of motor health and operation. Energized EMT looks at the voltage and current into the motor and makes a determination of the motor condition as described above. De-energized EMT is a horse of a different color. This testing methodology allows us to take a look at the motor and motor circuit when the motor is out of operation. In its static condition the motor and motor circuit can yield us valuable information about the health of the motor.
The most important of these is winding impedance. Many uninitiated folk believe resistance and impedance to be synonymous, which is in fact untrue. Impedance has a resistive component but they are separate electrical properties. Resistance is the opposition to current flow while impedance is the opposition to a change in current flow. An imbalance in the amount of impedance between sets of motor windings can indicate shorts between individual turns in a set of motor windings. A great deal of electrical failures in motors begins with turn-to-turn shorts, which in turn are often caused by the motor getting too hot and the winding insulation breaking down. But that’s a discussion for another time.
Other failure modes can be detected with De-Energized EMT also, including static eccentricity, high resistance connections and rotor bar faults. Each of these is worthy of a blog of its own, so keep an eye out for forthcoming blog posts on those topics.